In the spring of 2010, I took a course in hardware and rapid prototyping. Using Arduino microcontrollers and other electrical components, we created several projects throughout the course. This culminated in a semester-long, group project of our choosing.
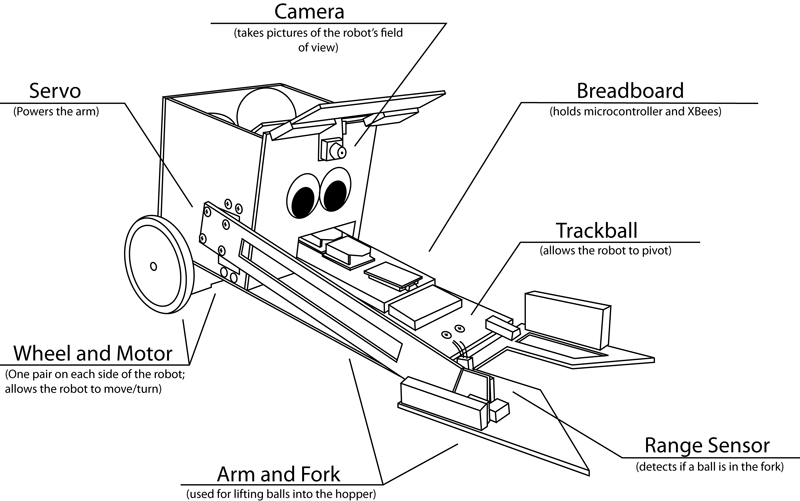
My group decided to create a robot that could scan the environment and collect ping-pong balls. It used a small camera to take pictures, and, using a network of wireless modules, it then transferred that information to a computer. The computer analyzed the images and sent back instructions to the robot. The robot could move forward and back, turn, and move its arm up and down. The schematic of the robot can be seen below as well as a video of the robot in action. The final report is also available for download. (In addition to the mentioned components, the body was cut out of acryllic using a laser cutter.)
Final Project Report